Инженеры из Токио разработали биогибридного робота, имитирующего движения человеческого пальца. В устройстве используются живые мышечные клетки крысы.
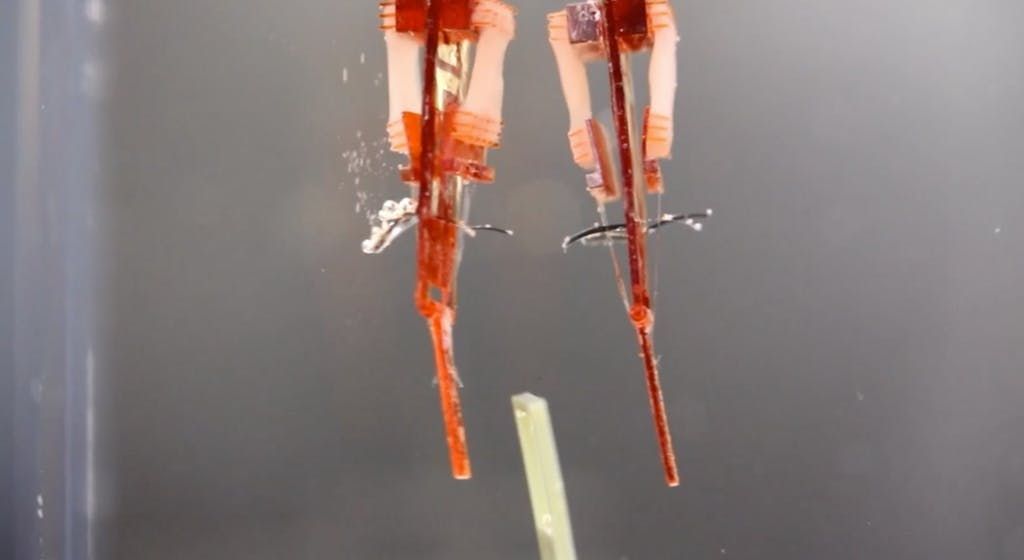
Исследователи из Токийского университета представили биогибридного робота, созданного на основе живой мышечной ткани крысы и каркаса из металла и пластика. Устройство имитирует движения человеческого пальца, оно способно перемещать небольшие предметы, сгибаясь в суставе. Описание разработки опубликовано в журнале Science Robotics.
Работая над другими конструкциями, инженеры выяснили, что традиционные материалы — пластик и металл — не позволяют воспроизвести движения и гибкость человеческих пальцев. Материалом для мускулов робота стали тонкие гидрогелевые пластинки, покрытые миобластами крысы — молодыми мышечными клетками, из которых впоследствии развивается поперечно-полосатая мышечная ткань. Пластинки укрепили на каркасе из металла и пластика.
Мускулы робота сокращаются, когда к ним подается электрический ток. Чтобы искусственный палец двигался так же, как человеческий, инженеры воспроизвели работу парных мышц — агонистов и антагонистов. Когда один из мускулов, входящих в пару, сокращается, другой расслабляется. По словам разработчиков, при такой слаженной работе искусственные мускулы «живут» дольше, чем в предыдущих экспериментах, где использовали одиночные мышцы.
Сустав нового робота сгибается почти на 90°, это позволяет выполнять сравнительно сложные задачи. Сейчас робот способен приподнимать предметы и перемещать их. Использование живой ткани накладывает определенные ограничения: например, устройство может работать только в воде, потому что при постоянном движении мышца быстро изнашивается. Сейчас срок жизни искусственного мускула составляет не больше недели.
Один из разработчиков, инженер Сёдзи Такеучи (Shoji Takeuchi), говорит: «Если мы сможем совместить больше таких мускулов в одном устройстве, нам удастся воспроизвести комплексное мышечное взаимодействие, которое позволяет функционировать рукам, ладоням и другим частям тела. Хотя наша разработка — лишь предварительный этап, такой подход может стать большим шагом к созданию более сложных биогибридных систем».
Ранее в США разработали ползающего робота на основе мышц морских улиток.